Abstract:
Stereo vision has become a fundamental technique in robotic perception and autonomous systems, offering dense depth estimation based on geometric disparities between stereo image pairs. However, traditional point-based feature matching approaches are often sensitive to textureless regions, illumination changes, and repetitive patterns, leading to degraded performance in challenging environments.
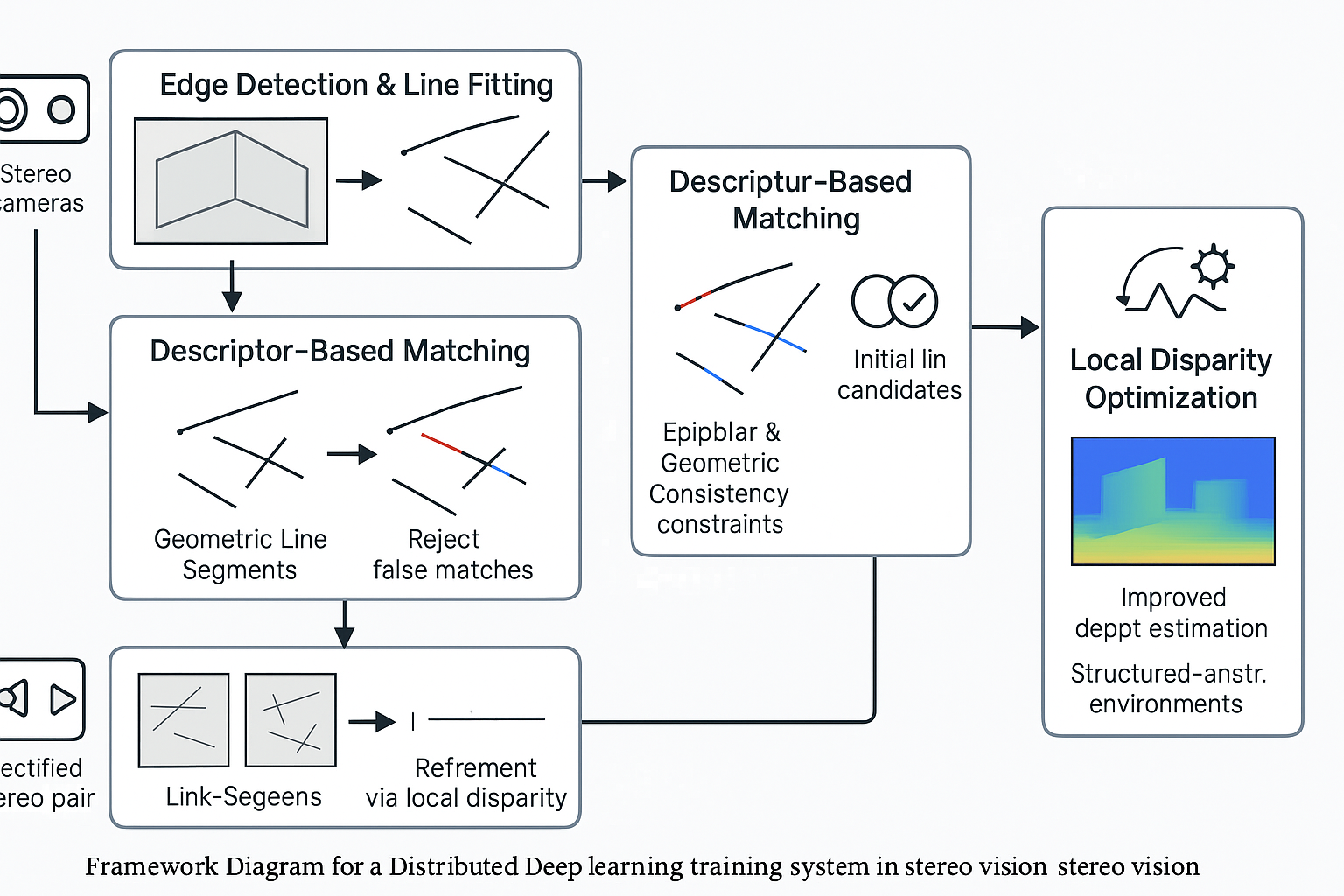
In this project, we implemented a line feature matching framework for stereo vision systems. Our method extracts geometric line segments from rectified stereo images using edge detection and line fitting algorithms. These line features provide structural information that can be more stable than point features in certain conditions.
We implemented a multi-stage matching pipeline that includes:
- Descriptor-based similarity metrics for initial line candidate selection,
- Epipolar and geometric consistency constraints for false match rejection,
- Local disparity optimization for refinement.
The matched line segments are used to guide dense disparity map generation for depth estimation. We tested our framework on public datasets to evaluate its performance compared to point-based methods.
This work explores the use of line features in stereo vision systems for applications such as autonomous driving, SLAM, and 3D scene reconstruction.
TLDR:
We implemented a stereo line feature matching framework that uses geometric line segments extracted from stereo images through edge detection and line fitting. The framework includes a multi-stage matching pipeline with descriptor-based similarity, epipolar constraints, and local disparity optimization. We tested this approach for depth estimation in stereo vision applications.