系统整体架构设计 - 基于FreeRTOS的多电机并发控制系统
本项目设计了一套基于FreeRTOS实时操作系统的多台无刷电机驱动控制系统,能够同时驱动三台无刷电机,具备并发控制能力。系统采用混合控制策略,集成传统六步换相控制和先进FOC(磁场定向控制)技术,为不同电机应用场景提供最优控制解决方案。
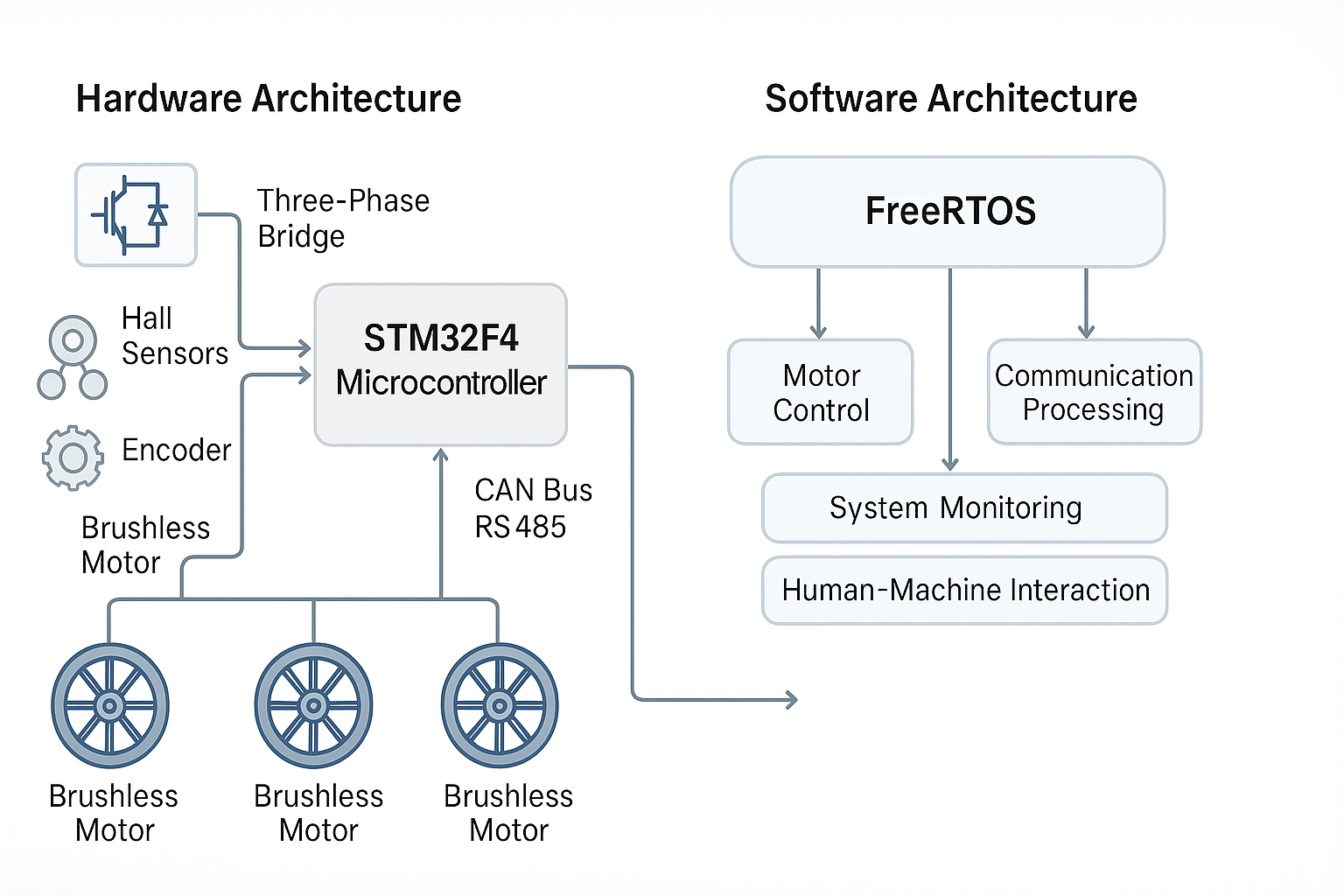
硬件架构采用STM32F4系列微控制器,配合三相桥式功率驱动电路、霍尔传感器、编码器和其他传感器模块,以及CAN总线和RS485通信接口。软件架构基于FreeRTOS多线程设计,实现核心任务包括电机控制、通信处理、系统监控和人机交互,确保1ms控制周期和±0.1%速度控制精度。
实现三台无刷电机的并发控制,通过混合控制策略提供高精度、高效率的电机驱动解决方案,适用于工业自动化、机器人控制等高端应用场景。
STM32F4系列微控制器,168MHz主频,1MB Flash,192KB RAM,支持浮点运算单元
三相桥式功率驱动电路,集成IGBT模块,支持400V工作电压,具备全面保护功能
霍尔传感器检测转子位置,光电编码器提供高精度位置反馈,温度传感器监控状态
CAN总线高速通信,RS485接口Modbus协议,以太网远程监控和配置
| 性能参数 | 指标值 | 说明 |
|---|---|---|
| 控制周期 | 1ms | FreeRTOS实时控制,确保系统响应性 |
| 速度精度 | ±0.1% | 高精度速度控制,满足精密工业应用 |
| 位置精度 | ±0.01° | 高精度位置控制,支持精密定位 |
| 并发控制 | 3台电机 | 同时控制三台无刷电机 |
| 工作电压 | 400V | 支持高电压工业应用 |
| PWM频率 | 50kHz | 高频率PWM控制,减少噪声振动 |